![]()
![]()
![]()
![]()
![]()
Haption社製3次元触覚/力覚インターフェイスデバイス
Virtuose 3D™

Virtuose 3D™はVirtuose 6D™の構造をベースに、並進方向に
のみフォースフィードバックを提供する6軸自由度、3軸力覚提示
の力覚フィードバック装置です。
Virtuose 3D™は、回転のフォースフィードバックを必ずしも
必要としないが、回転の位置制御が必要な1:1の仮想操作や遠隔
操作に特に適しています。
Virtuose 3D™は、リハビリテーションや医療用協働操作
ロボットに採用され、成功を収めています。
特長
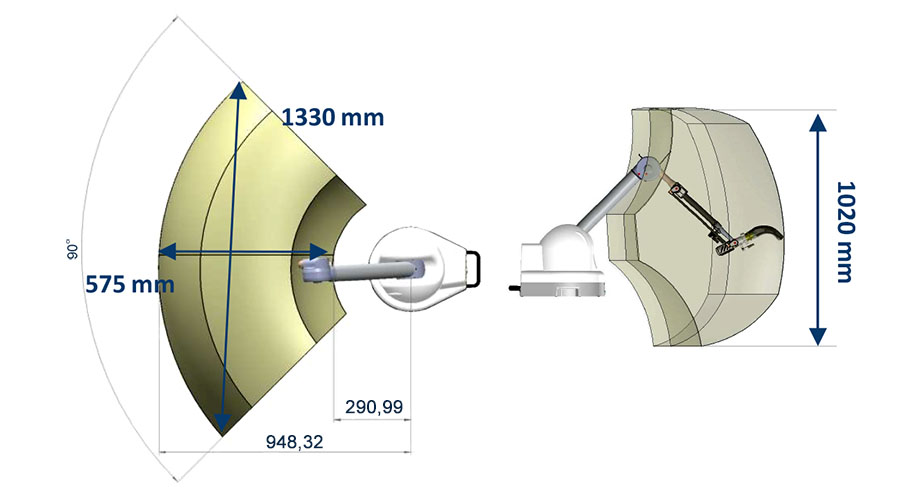
可動範囲
仕様
| Virtuose 3D™ | Virtuose 3D™ HF | ||
| 動作自由度 | 6自由度 | ||
| 力覚提示 / 位置検出 | 3軸 / 6軸 | ||
| ワークスペース | 並進 | 1330 x 575 x 1020 mm | |
| 回転 | 330 x 130 x 270 ° | ||
| 最大提示反力 | 並進 | 35 N | 70 N |
| 回転 | - | - | |
| 連続提示反力 | 並進 | 10 N | 30 N |
| 回転 | - | - | |
| 最大制御剛性 | 並進 | 2000 N/m | 10000 N/m |
| 回転 | - | - | |
| 位置分解能 | 並進 | 0.016 mm | 0.016 mm |
| 回転 | 0.35° | 0.35° | |
| フレームレート | 1000 Hz | ||
| 電源 | 100-240 VAC 50/60Hz | ||
| 消費電力 | 標準:200W 最大:540W | ||
| 本体重量 | 12 kg | ||
| ホストインターフェイス | Ethernet | ||
| ソフトウェアドライバー | Python™ for IPSI™、ROS™、ROS2™、CHAI3D™、ODE™ Matlab Simulink™、LabVIEW™ |
||
| プラグイン対応アプリ | 3DExperience™、Catia™/Delmia™ V5、Solidworks™ | ||
copyright (C) Nihon Binary Co., Ltd., All rights reserved.