![]()
![]()
![]()
![]()
![]()
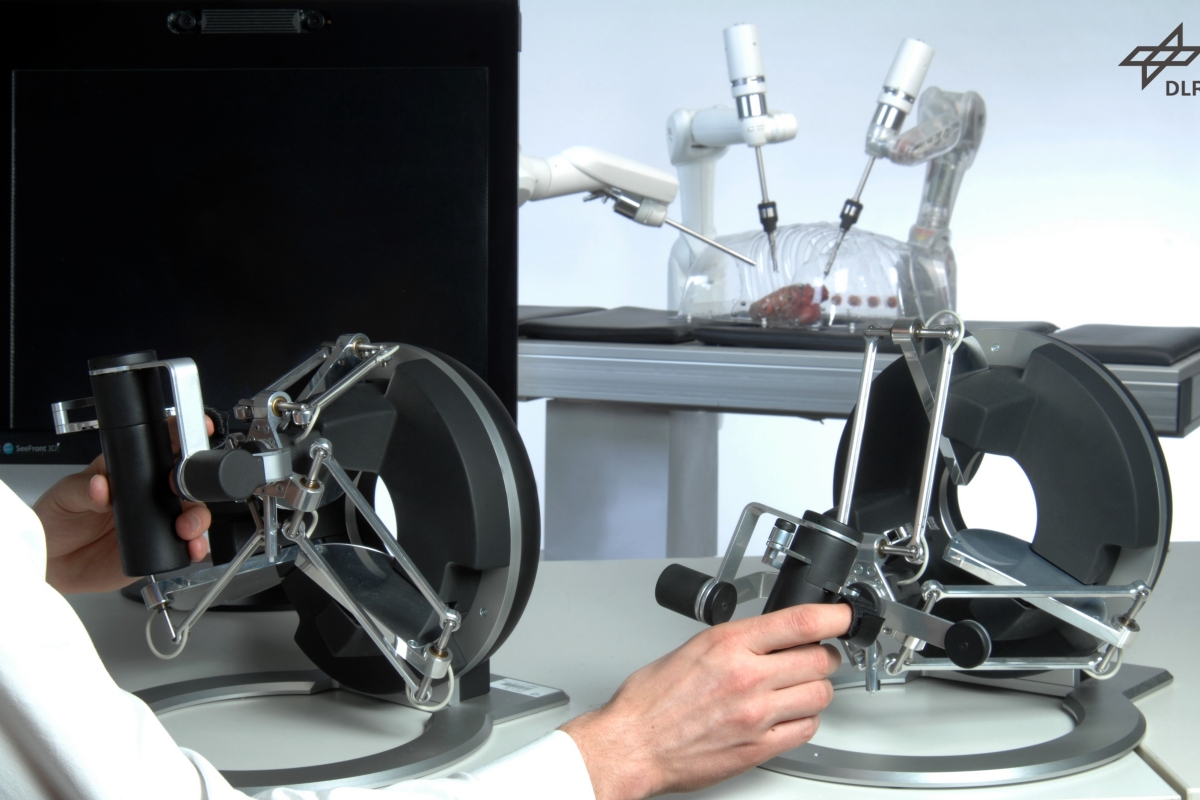
パラレルリンク方式 力覚フィードバック装置
omega シリーズ

omaga.3
 洗練されたキネマティックリンクとアルミニウムフレームを備えたomega.3は、シンプルさ
洗練されたキネマティックリンクとアルミニウムフレームを備えたomega.3は、シンプルさomaga.6
 omega.6は、幅広い手首の動きを備えたペン型のエンド エフェクターを備えた3自由度+
omega.6は、幅広い手首の動きを備えたペン型のエンド エフェクターを備えた3自由度+omaga.7
 独自のアクティブグリップエクステンションを備えた omega.7は、3自由度+3軸回転
独自のアクティブグリップエクステンションを備えた omega.7は、3自由度+3軸回転Force Dimension SDK
仕様
omega.3 |
omega.6 |
omega.7 |
||
| 自由度 | 3自由度+3力覚 | 3自由度+3軸回転検出 | 3自由度+3軸回転検出+1軸把持 | |
| 力覚提示空間 | 並進 | φ160 mm x 110 mm | φ160 mm x 110 mm | φ160 mm x 110 mm |
| 回転 | - | 240 x 140 x 320° | 240 x 140 x 180° | |
| 把持 | - | - | 25 mm | |
| 最大提示反力 | 並進 | 12.0 N | 12.0 N | 12.0 N |
| 把持 | - | - | ± 8.0 N | |
| 位置分解能 | 並進 | < 0.01 mm | < 0.01 mm | < 0.01 mm |
| 回転 | - | 0.09° | 0.09° | |
| 把持 | - | - | 0.006 mm | |
| インターフェース | USB2.0 (リフレッシュレート 最大 4 KHz) |
|||
| プログラマブルボタン | 1 | 1 | 1 (Grasp) | |
| 電源 | 100-240V | |||
| プラットホーム | Microsoft | Windows | ||
| Linux | 全てのディストリビューション | |||
| Apple | macOS | |||
| BlackBerry | QNX | |||
| WindRiver | VxWorks | |||
| SDK | Haptics SDK Robotics SDK CHAI 3D |
|||
| エルゴノミクス | 右手用、左手用 共用 | 右手用または左手用のどちらかを選択 | ||
| 構造 | デルタベースのパラレルリンク機構 アクティブ重力補償 |
|||
| キャリブレーション | 自動 | |||
| 安全機構 | 速度監視 電磁ダンピング |
|||
イメージギャラリー
 |
 |
 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.