![]()
![]()
![]()
![]()
![]()
アセンブリシミュレーションシステム
- リアルタイム干渉判定・軌跡生成
IFC/Virtuose
 IFC/Virtuose は部品着脱性の評価、サービス性評価検討、人間工学的作業姿勢の検証などのための
IFC/Virtuose は部品着脱性の評価、サービス性評価検討、人間工学的作業姿勢の検証などのための
Haptin社のアセンブリシミュレーションシステムです。
CATIAまたはDELMIAのDMUナビゲータを強力に補完し、力覚フィードバック装置や3Dマウスによる
インタラクティブなシミュレーションを可能にします。CATProductの内部で干渉判定を行いながら
自由に部品が移動できることで、作業性と生産性を格段に向上させることができます。
特徴
・ 強力な干渉計算エンジンによるリアルタイム干渉判定
干渉計算エンジンはCATProductのモデルをジオメトリデータに自動変換し、サブミリメートル分解能での干渉検出を可能にします。
干渉が生じている箇所とその強さが視覚的に示されますので、作業者は部品の可動方向を簡単に判断することができます。
・ 部品組み付け・取り外しの軌跡生成
シミュレーション中の部品の動きはすべて記録され、簡単に軌跡データを作成することができます。
作成した軌跡を保存して、DMUの標準機能を行うことが可能です。
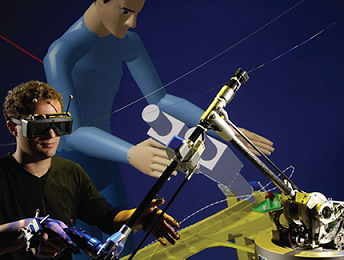
・ 力覚フィードバック装置での感触による干渉チェック
6自由度力覚フィードバック装置Virtuose 6D35-35を用いることで、部品間あるいは手や腕と部品の干渉を、感触を以って認識することができます。
視覚的な干渉検出と違い、作業者は物理的な応答に従って組立成立性を評価することが可能となります。
XYZ方向だけでなくトルク反力も生成するため、部品の回転の制限も表現します。
また、主に設計段階での使用のために、小型デスクトップサイズのVirtuose 6Ddesktopも用意されています。
・ マネキンアームによる干渉シミュレーション
マネキンアームを挿入し、手と部品を接合した状態で干渉シミュレーションを行うことができます。
手や腕のキネマティックスの正しい拘束を保ちつつ、周辺部品との干渉も干渉エンジンによって計算されます。
・ CATIA V5/DELMIA V5ダイレクトインターフェース
IFC/VirtuoseはDMUナビゲータまたはDPMアセンブリに新たなツールバーとして追加され、CATIA/DELMIAの日常の使用環境で使用することができます。
データはCATPartやCGRなどの形式のまま扱うことができ、フォーマット変換や外部エクスポートなどの面倒は一切ありません。
・ モーションキャプチャによるリアルタイムでのマネキン動作
オプションモジュールのIFC HumanとドイツART社のモーションキャプチャ装置を用いることで、マネキンの挙動をリアルタイムでコントロールすることが
可能となります。作業性の検討や負荷解析におけるHumanの操作が大幅に簡易化されるばかりでなく、検討会などで効率の良い共同検証作業を実現します。
・ 3Dマウスによる自在なナビゲーション
力覚フィードバック装置がなくても、SpaceTravelerやSpace Navigatorといった3Dマウスを使用することができます。感触はないものの、任意の部品や
工具を3次元空間内でダイナミックに移動や回転させることができ、通常のマウス操作による部品の移動や軌跡生成に比べて飛躍的に操作性が高まります。
主な用途
・ 部品着脱性の評価
・ サービス性評価検討
・ 作業性・作業姿勢検証
・ 人間工学シミュレーション
・ 生産ライン・製造工程検討
・ 教育・トレーニング
・ 塗装・溶接ロボット
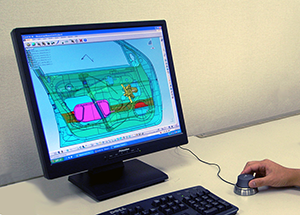
|
| 3Dマウスによる使用例 |
対応デバイス
| Virtuose 6D | 実スケール6自由度力覚フィードバック装置 |
| Virtuose 6D Desktop | デスクトップ型6自由度フィードバック装置 |
| ART track | リアルタイムモーションキャプチャシステム |
| SpaceTraveler/SqaceNavigator | 3Dナビゲーションデバイス(3Dマウス) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.