![]()
![]()
![]()
![]()
![]()
baxter Research Robot

研究・教育用
双腕ロボットプラットフォーム
■ 双腕 14自由度(片腕7軸制御)■Rethink the Future■
《未来は作り出すもの...》
Baxter Research Robotは、新世代の生産支援ロボットとして製造業の世界に革命を起こした作業用双腕ロボットBaxterと
まったく同じハードウェアに、オープンソースのロボット開発環境ROS(Robot Operating System)を用いたプログラミング
を可能にすることで、研究室や教育現場に安全で信頼性に優れ、使い勝手のよい双腕ロボットプラットフォームを提供します。
■高い安全性■
《人間共存・協調型ロボットの理想型》

実験環境での安全性の確保は極めて重要な問題で、いかなる場合でも人体に危険が及ぶことのないよう細心の注意が
求められます。しかしながら、自身の研究課題に没頭するあまり、つい危険の認識がおろそかになりがちです。
Baxter Research Robotは、マサチューセッツ工科大学の特許技術であるSEA ( Series Elastic Actuator: 直列弾性
アクチュエータ)を両腕すべての関節に実装、万一衝突があったときにも弾んで衝撃を柔らげます。安全柵がなくても
安心して研究に集中することができます。そしてこの本質的な安全性こそが、Baxterが研究用途にとどまらず教育分野
での活用に広かがりつつある最大の要因です。
■オールインワンの汎用プラットフォーム■
片腕につき7軸制御(双腕で14軸+首振り2自由度)、各関節のトルクセンサ、頭部と両手首にカラーカメラ(手首には
距離センサも実装)、頭部のディスプレイと360度ソナーセンサ、といったように、Baxter Research Robotは多くの制御
機構やセンサを標準で内蔵しています。これら標準実装のセンサ類は外部PCから自在に制御できますので、研究や実験の
目的に応じた活用が可能です。ヒューマノイド型ロボットを用いた多種多様な研究テーマに柔軟に対応する汎用プラット
フォームとして、今や持つべきロボットとして急速な普及が進んでいます。
■オープンソース開発環境■
《ROS (Robot Operating System)》


Baxter Research Robotは、ロボットプログラミングの標準ツールとして広く普及しつつある、オープンソースのROSを
用いたダイレクトプログラミングを可能にします。ユーザーはBaxter Research Robotに接続した開発用ワークステーショ
ンから自身のプログラムを実行することができ、あるいは内部CPU上での実行も可能です。
一連のサンプルプログラム、デモビデオ、オンラインドキュメント、など充実したサポートツールがWikiとして提供されて
います。また、広範でアクティブなユーザーコミュニティには、多くの有益な情報が蓄積されており、ユーザーを強力に
支援します。このため、新規のユーザーでも短期間で使い始めることができます。
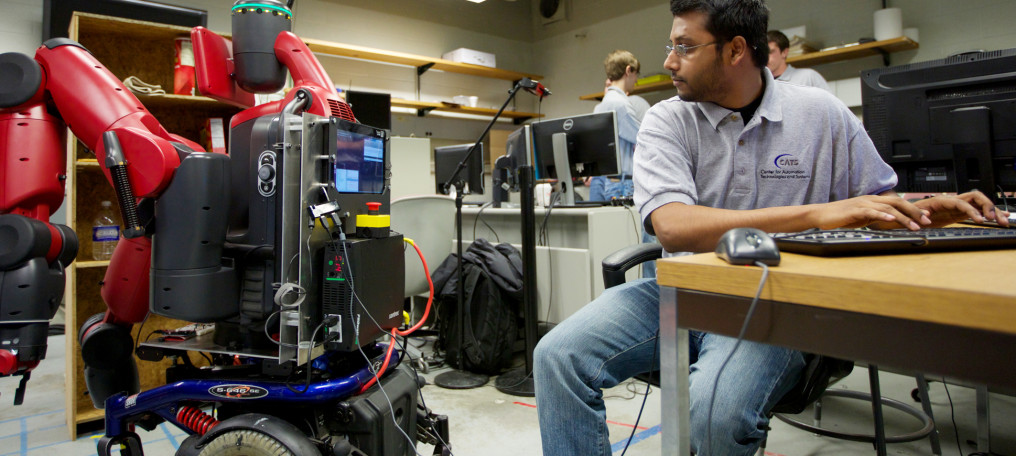
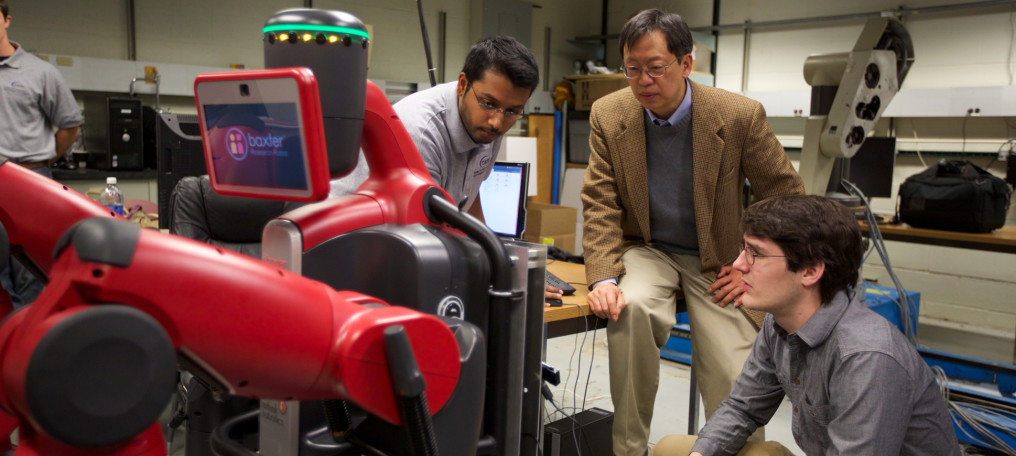
■アプリケーション事例■
《その無限の可能性...》
|
|
||||
|
|
||||
|
|
||||
|
|
■仕様■

| 特 徴 | 性 能 ・ 利 点 |
|---|---|
| 完全統合化システム | ・ 外部コントローラーペンダントなど周辺機器が不要 ・ 開梱して電源を入れたら即使用が可能 ~従来の産業用ロボットに比べて容易な導入 |
| ビエイビアベースの インテリジェンス |
・ 実世界の状況に「常識的」に応答する本質的能力 (例:部品をどこかへ移動するには、まず手に持たなければならない事を理解している) ・ 多様な条件やタスクに適合 |
| 実演で示すティーチング | ・ アームを掴んで動かすだけ、簡単ティーチングでプログラミング不要 ・ 「顔」スクリーンで手順を説明、目は認知と理解を示す |
| ビジョンガイドと ダイレクト移動 |
・ 多様な種類の部品と配置に対応 ・ ビジョンを用いて、部品の大きさ、位置、コンベアの速度といった条件に的確に適応、 汎用性を拡張 |
| 簡単操作ソフトウェア | ・ 分かり易い直感的なユーザーインターフェイスによるインタラクションとティーチング ・ 生産工程における標準的な作業タスクを実装、ソフトウェアアップグレードで常に性能 と機能を向上 |
| 双腕ヒューマノイド | ・ 2本の7自由度アームによる器用な動きと広い作業範囲 ・ それぞれの腕が別のタスクを実行、あるいは2本の腕で同じタスクを並行して実行 すれば2倍の能力 |
| 包括的な安全設計 | ・ 本質的に安全 関節のコンプライアンス性、バックドライバブルモーター、保護カバー、 ピンチポイントなし ・ 人との衝突を感知して衝撃力を最小化 ・ 緊急停止スイッチ付き、さらに安全管理のための外部システムとの接続も可能 |
| 周囲環境の高度なセンシング | ・ 360度全周囲ソナーで周囲の人と環境を察知 ・ 両手首と頭部にカメラを実装、部品の検出や作業空間を認識 ・ 物体や作業台との接触を感知する力検出機能 |
| 取替え可能なエンドエフェクタ | ・ 選べる電動並行グリッパーと真空吸着グリッパー ・ サードパーティ製カスタムエンドエフェクタにも対応 |
| 技術的仕様 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||
| ||||||||||
| ||||||||||
| ||||||||||
| ||||||||||
| ||||||||||
| ||||||||||
copyright (C) Nihon Binary Co., Ltd., All rights reserved.