![]()
![]()
![]()
![]()
![]()
フォース制御ロボットアーム
WAM Arm
|
人との共存の為に設計されたロボットアーム バックドライバブル・ケーブル駆動 WAM Arm 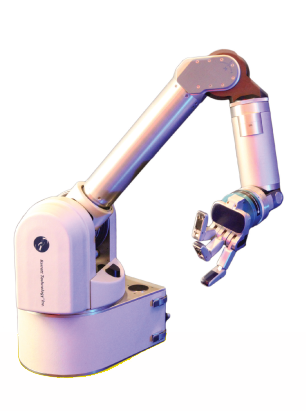
|
  奈良先端科学技術大学院大学  アイオワ大学 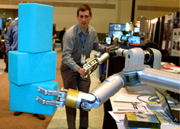 マスター・スレーブ  モバイルプラットフォームへ搭載  シカゴリハビリテーション研究所(RIC) |
|
■ 4自由度または7自由度アーム ■ アーム全体での力制御を可能にするバックドライバビリティ ■ ギアレス・ケーブル駆動によるゼロバックラッシュ ■ 最大リーチ1m、平均270度の広域なアーム動作範囲 ■ モバイルプラットフォーム搭載に適した小型ベースと低消費電力 ■ 高速駆動における慣性を軽減する軽量デザイン ■ 高度技巧的な動作を可能にする運動学的冗長性 ■ 独自開発の超小型サーボコントローラ 「PUCK」搭載 ■ 外部コントローラ不要の一体型構造 |
特長
|
・コントロールキャビネット無し ・低消費電力 ・AC又はDC動作 ・長く細いリンク構造 ・高度なバックドライブ ・安全の為のフォースセンサ無し、 モーター電源有り/無しでの直接教示 |
・Cartesianフォース制御 ・重力補正 ・静音動作 ・人間に近い動作 ・ハイパフォーマンス空間ベクトル交換 ・アンプリファー内蔵 ・ブラシレスモーター |
・オープンソース C/C++制御ソフト ・1KHzモータートルク制御 ・フィールドアップグレード可能な ファームウェア ・4-ワイヤバス(電源x2、通信x2) ・各軸ごとに2系統のデジタル入出力信号 ・各軸ごとに2系統のアナログ入出力信号 ・安全の為に全ジョイントロック無し |
|
モバイルプラットフォームロボット |
前腕力覚リハビリテーション(医療) |
フォース制御ロボットアーム
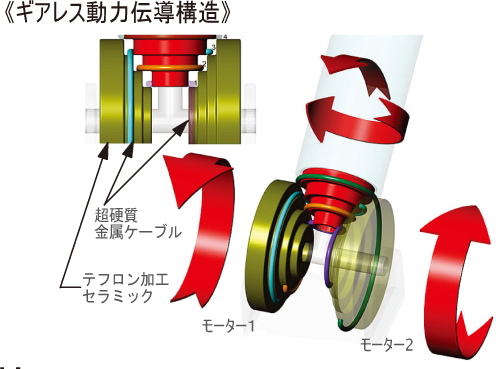
 1980年代の後半、当時MITで ロボット制御の研究に係わっていたWilliam T. Townsendは、いかに
1980年代の後半、当時MITで ロボット制御の研究に係わっていたWilliam T. Townsendは、いかに ケーブルとシリンダーによる動力伝導によって、低摩擦と低慣性そしてほぼ
ケーブルとシリンダーによる動力伝導によって、低摩擦と低慣性そしてほぼ仕様
| 4-DOF | 7-DOF | ||
| 関節数 | 4 | 7 | |
| モーター数 | 4 | 7 | |
| 最大可搬質量 | 4 kg | 3 kg | |
| 本体質量 | 25 kg | 27 kg | |
| 最大動作速度(先端部) | 3 m/Sec | 3 m/Sec | |
| 総関節フリクション | 3 Nm | 3 Nm | |
| 機械的剛性 | 1.5 x 106 N/m | 1.5 x 106 N/m | |
| 制御剛性 | 5000 N/m | 5000 N/m | |
| 繰り返し位置精度 [関節エンコーダオプション使用時] |
1 mm [0.1 mm] | 2 mm [0.2 mm] | |
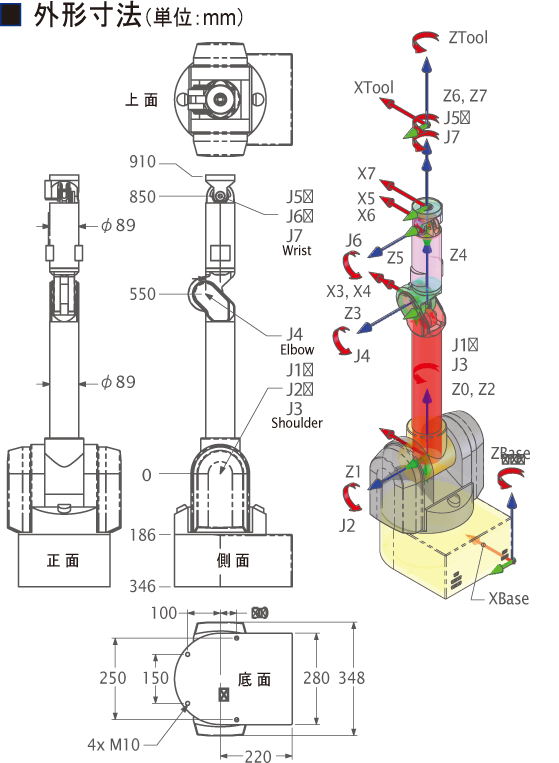
| 最大リーチ半径 | 1000 m | 1000 m | |
| 動作範囲容積 | 3.5 m3 | 3.5 m3 | |
| 動作範囲 | J1 | 300°(-150 ~ 150°) | 300°(-150 ~ 150°) |
| J2 | 226°(-113 ~ 113°) | 226°(-113 ~ 113°) | |
| J3 | 314°(-157 ~ 157°) | 314°(-157 ~ 157°) | |
| J4 | 230°(-50 ~ 180°) | 230°(-50 ~ 180°) | |
| J5 | - | 344°(-273 ~ 71°) | |
| J6 | - | 180°(-90 ~ 90°) | |
| J7 | - | 344°(-172 ~ 172°) | |
| 駆動電源 | 24 ~ 80VDC / 50W | ||
| 電源ユニット | 入力 | 100 ~ 240VAC、50/60Hz | |
| 消費電力 | 60W | ||
| 外形寸法 | 279.4 x 127 x 63.5 mm | ||
| 重量 | 2.27kg | ||
| 制御インターフェイス | Ethernet(有線および無線)、CANbus | ||
| 付属品 | コントロールペンダント、ディスプレイペンダント、メインテナンスキット | ||
| ソフトウェア | C/C++ライブラリ、ROS | ||
 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.