![]()
![]()
![]()
![]()
![]()
自律走行ロボット 研究・開発用プラットフォーム
TurtleBot 4


特徴

|
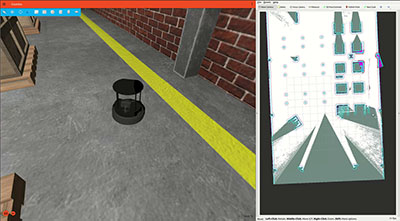
すぐに始められる TurtleBot 4は、詳細なユーザードキュメント、Ignition Gazeboシミュレーションモデル、デモコード、および一連のチュートリアルとともに、 ROS 2がプリインストールおよび構成された状態で完全に組み立てられた状態で出荷されるため、ロボット工学アプリケーションの開発をすぐに開始できます。 |
|
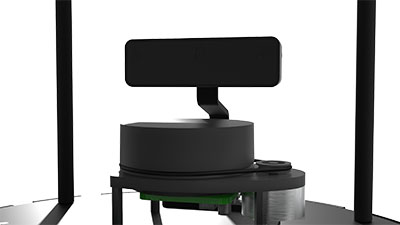
センサーパック TurtleBot 4には、多くのロボット工学アプリケーションに理想的な統合センサーアレイが付属しています。オンボードセンサーには、OAK-D空間AIステレオカメラ、 2D LiDAR、IMU、光学式床面追跡センサー、ホイールエンコーダー、赤外線、段差、突起、スリップ検出などが含まれます。 すべてのオンボードセンサーは、ネットワークに接続されたROS2APIを介してROSトピックとして利用できます。 |
|

|
現代のモビリティ TurtleBot 4 は、iRobot ® Create 3 教育用ロボットをベースに構築されています。頑丈なモバイルベースは、正確な位置特定とポジショニングのための 一連のインテリジェントセンサーを備え、出荷時で9kg、カスタム構成で最大15kgの可搬重量を持ち、最高速度0.306 m/sを実現しています。 Create 3は、スタンドアロンのROSインタフェースを備え、これまでのTurtleBotsとは異なり、内蔵バッテリーと充電ドックを搭載しています。 |
|
構築および拡張 基本をマスターしたら、独自のセンサーとカスタムペイロードを追加して、TurtleBot4の機能を簡単に拡張できます。アクセス可能なUSBポート、 電源出力、および上部の取り付けプレートにより、サードパーティのハードウェアとコンポーネントを簡単に統合できます。 ROS 2とそのマイクロROSのサポートにより、組み込みマイクロコントローラーの拡張と統合がこれまでになく簡単になります。 |

|
|
教育現場に最適 TurtleBot 4には、レッスンプラン、講義コンテンツ、チュートリアル、サンプルテストなどの包括的なコースウェア資料が付属しているため、 教育者はTurtleBotをロボット工学トレーニングコースに簡単に組み込むことができます。 |
|
オープンソースをサポート TurtleBotはオープンソースプラットフォームであり、GitHubで デザインとソフトウェアを入手できます。試す、拡張する、もしくは独自に作成することをお勧めします。 尚、出荷されたすべてのTurtleBot4の収益の一部は、ロボット工学の研究と教育におけるオープンソースソフトウェアの開発、配布、および採用の継続的な サポートのためにOpenRoboticsに送られます。 |
|
仕様
 |
 |
 |
| TurtleBot 4 Standard | TurtleBot 4 Lite | |
| 341 x 339 x 351 mm | 寸法 | 341 x 339 x 192 mm |
| 3.9 kg | 重量 | 3.3 kg |
| 0.31 m/s | 最高速度 | 0.31 m/s |
| 9 kg(標準) 15 kg(カスタム構成) |
最大可搬重量 | 9 kg(標準) 15 kg(カスタム構成) |
| 2.5 ~ 4時間 (積載重量による) |
連続動作時間 | 2.5 ~ 4時間 (積載重量による) |
| OAK-D-PRO | カメラ | OAK-D-LITE |
| RPLIDAR-A1 | LiDAR | RPLIDAR-A1 |
| 有 | アクセサリ電源及びUSBポート | 無 |
| 有 | 有機ELディスプレイ | 無 |
| 有 | マウンティングプレート | 無 |
| ROS 2 | ソフトウェア | ROS 2 |
| Raspberry Pi 4B (4GB) | 内蔵コンピュータ | Raspberry Pi 4B (4GB) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.