Barrett Technology社の技術と経験を結集
広大な作業空間を持つ力覚フィードバックアーム
■
3次元力制御、広大な作業空間、コンパクト設計
Proficioは、成人の腕の動作領域全体をほぼカバーする作業空間を持っています。腕全体を動かすボリューム全体で質の高い力覚フィールドバックを必要とする用途に最適なハプティックデバイスです。
■
リハビリテーション支援
Proficioは、脳卒中リハビリテーションでの応用をその主用途として開発されました。運動機能回復のための実証された技法と効果的に組み合わせて使用できるよう、考慮されています。その一例のリハビリテーションゲームでは、障害の程度や機能の向上に応じてプレイの種類や難易度を詳細に設定でき、採点結果を経時データとして保存、追跡管理することができます。
■
多様なアプリケーション
上肢リハビリテーションのための新たなモダリティの研究開発、最新のニューロリハビリテーション理論を用いたロボット支援による療法の開発と評価、あるいは1:1スケール操作を可能にするワークスペースを活かした様々なアプリケーションに使用できます。
また、ユーザー独自のアクチュエーターやセンサーを備えたカスタムエンドエフェクター製作のためのインターフェイスが用意されています。
■
すぐに使える簡単操作
・可搬性:コンパクト設計により、どこでも容易に持ち運んで使用することができます。
・柔軟的:使用者の座位や右左腕の切り替えに応じて柔軟な配置が可能です。
・操作性:トランスパレントなダイナミクス、低い慣性、力覚表現の忠実度といった特徴を持つアームは、効果的な反力を生成しつつ、負荷のない極めて自然な操作を可能にします。
■
高い安全性と信頼性
Barrett Technology社の25年を超える経験と技術に基づいて開発されたProficioは、ワイア-を用いたギアレス駆動による純粋なインピーダンス制御によって自然なバックドライバビリティを持っています。さらに、堅牢でインテリジェントな安全システムは、常に力と速度を監視しています。安全性の限界を超えたときは、滑らかに停止してフリーな状態になります。
■
両腕操作用セットアップ
両腕操作のために2台のProficioを用いた場合、現在市場にあるいかなる装置もなし得ない、両腕のオーバーラップ空間における力の統合を応用した両腕システムを製作することができます。
■
オープンソース開発環境
Proficioの制御ライブラリはLinux上で動作し、完全にオープンソース化されています。リアルタイムでのモータートルクといった低レベル制御から、高レベルなC++やPythonバインディングによるモーション&力制御まで、それらのすべてに直接アクセスすることができます。
ROSに対応していますので、パスプランニングからビジョン、さらにはそれ以上まで、膨大なロボットコードのライブラリを活用することができます。
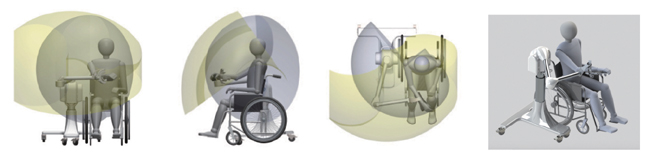
●
Proficio 配置例
| Proficio 仕様 |
| ・ 最大リーチ | : | 1.05 m |
| ・ ワークスペース | : | 960 リットル |
| ・ システム総容量 | : | 11.5 kg |
| ・ 最大提示反力 | : | 45 N(安全制限による) |
| ・ 最大動作速度 | : | 1.5 m/秒(安全制限による) |
| ・ 機械的剛性 | : | 5000 N/m |
| ・ 制御可能剛性 | : | 2500 N/m |
| ・ 位置分解能 | : | 200 μm |
| ・ 力分解能 | : | 5.6E-3 N |
| ・ 動作環境温度 | : | 0℃以上 85℃以下 |

 ・腕全体の動きをカバーする広大なワークスペース
・腕全体の動きをカバーする広大なワークスペース