![]()
![]()
![]()
![]()
![]()
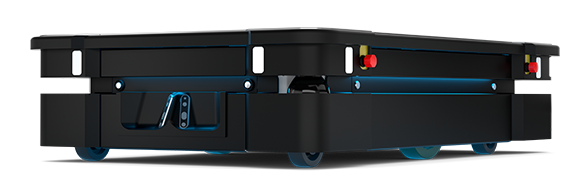
荷物運搬用モバイルロボット
MiR1000
 可搬重量1トン
可搬重量1トン 
特徴
アドオン
|
MiR Pallet Lift
1000 40" x 48" パレットを 自律的にピックアップ/アンロード 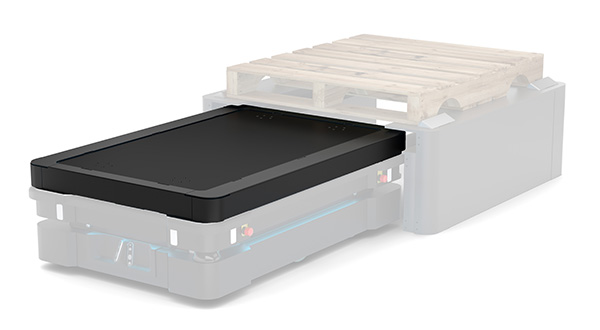  |
MiR EU Pallet Lift
1000 EUパレットを 自律的にピックアップ/アンロード  |
|
MiR
Charge
48V
完全自動の充電ステーション MiR Charge 48Vは、MiR250 / MiR500 / MiR1000 専用充電ステーションです。 バッテリー残量が少なくなると、ロボットは自律的に 充電ステーションへ移動・接続します。 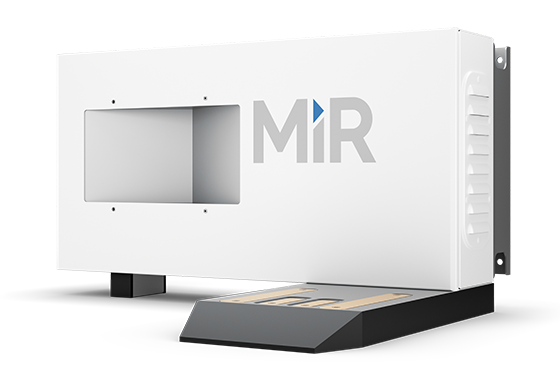
電源仕様: 出力:48V/20A@120VAC、48V/40A@240VAC 入力:100~240VAC、50-60Hz |
MiR
Fleet ロボットの運行を最適化 走行管理ソフトウェア ・ ロボットの集団を効率的に集中管理 - 現在位置と 空き状況に応じて、適所に優先的・選択的に配備 ・ 異なるトップモジュール、フックやその他の アクセサリの使用計画作成 ・ ソフトウェア開発ツール REST-APIによってERP との連携にも対応  |
MiR Academy - MiRロボットの無料オンライントレーニング
|
MiR社では、MiR自律走行ロボット(AMR)の動作や使用方法の詳細を、 お客様が簡単に学習できるように努めております。 誰でも参加できるオンライントレーニングMiR Academyは、 MiRユーザーはもちろん、現在導入を検討しているすべての皆様に、 AMRに関する技術情報を提供しています。  MiR Academy |

|
仕様
| 寸法 | 920 x 1350 x 320 mm |
| 床面上の高さ | 30 mm |
| 本体重量 (無荷重) | 231 kg |
| 積載面積 | 900 x 1300 mm |
| RALカラーチャート | RAL 9005 / Signal Black |
| 最大荷重 | 1000kg |
| バッテリー持続時間 | 8時間 |
| 最高速度 | 1.2 m/秒 (時速 4.3 km/h) |
| 回転半径 | 2000 mm |
| 位置決め精度、VLマーカーへのドッキング | ± 5 mm以内 (ロボット中心)、角度:± 1° |
| 横断間隔・乗越敷居幅 | 20 mm |
| バッテリー | Li-NMC、 48V、 40Ah | |
| 充電時間 | 電源ケーブル使用時:2 時間 (10%~90%) MiRCharge使用時: 1 時間 (10%~90%) |
|
| バッテリー充電器 | 入力:100 ~ 230 VAC、50/60Hz 出力:48 VDC、最大 40 A |
|
| 充電可能回数/td> | 700回以上 | |
| 周囲温度範囲 | + 5 ℃ ~ 40 ℃ (湿度:10 ~ 95% 結露なし) |
| 保護等級 | IP 21 |
| 適合規格 | 5種類の安全機能 (ISO 13849-1 準拠) 標準規格:ISO/CD 3691-4、EN1525、ANSI B56.5 EMC:EN12895、EN61000-6-2、EN61000-6-4 |
| WiFi | デュアルバンドワイヤレス AC / G / N / B |
| 外部入出力 | デジタル出力 (x4)、デジタル入力 (x4) Ehrtnet (x1)(Modbusプロトコル) |
| レーザースキャナ― SICK microscan3 (x2) | 360°ロボット周囲視覚的保護 |
| 3Dカメラ Intel RealSens D435 (x2) | 床面上前方:床面から高さ 1700mm、距離950㎜の物体を検出 総水平視野角:114° 床面視界:正面から最少250mm |
| 近接センサー | x8 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.