![]()
![]()
![]()
![]()
![]()
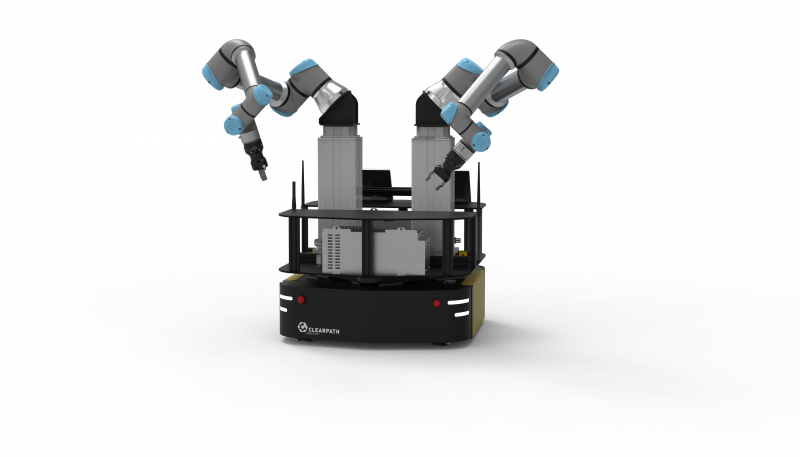
中型屋内ロボットプラットフォーム
REDGEBACK
|
・ 全方向移動 ・ 最大荷重 : 100 kg ・ 最高速度 : 1.1 m/秒 ・ 連続動作 : 15 時間 |
概要
REDGEBACKは、オムニドライブを使用してマニピュレーターや重いペイロードを簡単に移動させる中型の屋内ロボット
プラットフォームです。無指向性ベースは、制約のある環境での正確な位置決めを提供し、オンボードコンピューター、
フロントおよびオプションのリアレーザースキャナー、およびIMUと完全に統合されています。
RIDGEBACKは、ROSとGazeboのネイティブ統合を提供し、Clearpathの幅広いロボットアクセサリとプラグアンド
プレイで互換性があります。
特長
仕様
| 外形寸法 | 960mm(全長) x 793mm(幅) x 311mm(高さ)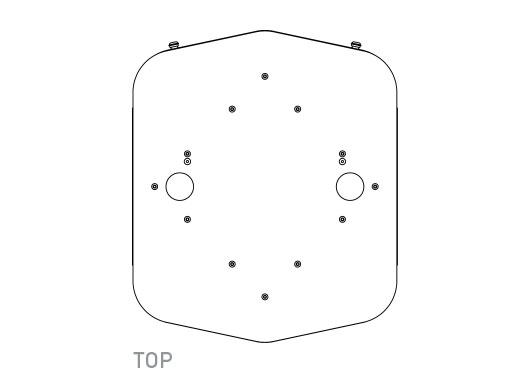
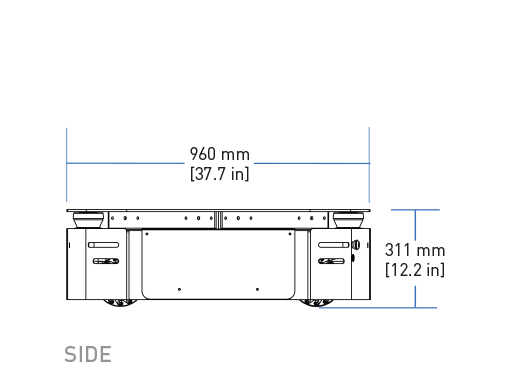
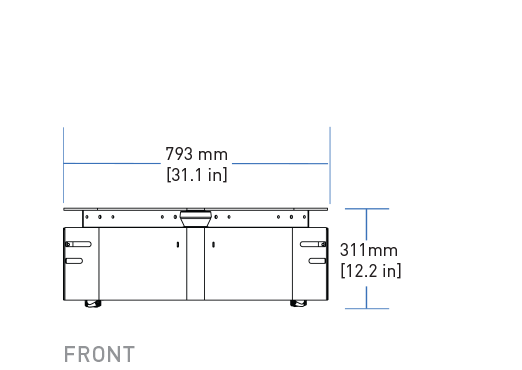
|
| ベース重量 | 135kg |
| 障害物クリアランス | 18 mm |
| ペイロード | 100kg |
| 最大速度 | 1.1 m/秒 |
| 駆動方式 | 4個の独立駆動全方向車輪 |
| 対応環境 | 屋内 |
| バッテリー | マリーングレード AMG 密閉式鉛電池 |
| バッテリー容量 | 24V 100Ah |
| 連続稼働時間 | 15時間(最大荷重時) |
| 充電時間 | 8時間 |
| 供給電源 | 5V、12V 、24VDC (フューズ容量 各10A) オプション : 120VAC |
| 消費電力 | 標準 800W、陸上電源供給可能 |
| 制御モード | 運動制御 (前進、横移動、回転)、各車輪速度 |
| フィードバック | エンコーダー、オンボードIMU |
| 通信 | Ethernet、USB、RS232 |
| ドライバ/API | ROS Melodic、ROS Kinetic |
| 付属ハードウェア | オンボードコンピューター、レーザー、ジャイロスコープ |
アクセサリ
 Panda Franka Robotics |
 UR10 Universal Robots |
 LMS-111 Lidar SICK |
 3 Finger Gripper Robotiq |
パッケージ
| UR5E MANIPULATION PACKAGE | |
| アプリケーション例
+ ロボティクスマニピュレーションの研究 |
 |
|
含まれるアクセサリ |
|
| INDOORNAV PACKAGE | |
| アプリケーション例
+ 屋内環境での堅牢なポイント toポイント 自律ナビゲーション |
 |
|
含まれるアクセサリ |
|
copyright (C) Nihon Binary Co., Ltd., All rights reserved.