![]()
![]()
![]()
![]()
360度全方向感圧触覚センサー内蔵ロボットハンド
AllegroHand V5 (4FPlus)
指先に360度全方向感圧触覚センサーを
内蔵した費用対効果が高く、適応力に
優れたロボットハンド

4本の指と16個の個別電流制御が可能な関節でロボットハンドのグリップと制御のための
研究に適したプラットホームです。
特徴
・ 研究や産業でのアプリケーションを備えた費用対効果の高い器用な操作
・ 多様なオブジェクト ジオメトリーを処理できる、直ちに適用可能な多数のセンサーレス グリップ アルゴリズム提供
・ 個別に電流制御可能な16の関節(4指x各4自由度)
・ リアルタイム制御とオンライン シミュレーション支援
・ 全方向触覚センサーを各指先に適用し、さまざまなタイプの研究を可能にしました
指先圧力センサー
指の形をした360°全方位感圧触覚センサー

指先タイプ
 |
タイプ A (デフォルト) 標準アタッチメントモデル 外部シリコン表面を支える内部構造により、 しっかりと握ることができます |
 |
タイプ B シリコーン表面の支持構造が外部に配置 されているため、デリケートな物体の把持に 適しています |
 |
タイプ C センサーの長さが短くなり、測定が上部に 制限されます。センサー部分が短いため、 しっかりと握ることができます |
 |
タイプ D センサーの背面に幅広の支持構造が 取り付けられており、強力な横方向の グリップが可能です |
仕様
| 指の数 | 4 (3指 + 親指) | |
| 自由度 | 16 (4指x各4自由度) | |
| 駆動方式 | モーター | DC モーター |
| ギヤ比 | 288.35:1 576.7:1 (親指を除く指の第2関節) |
|
| 最大トルク | 0.92 Nm 1.84 Nm (親指を除く指の第2関節) |
|
| 公称トルク | 0.23 Nm 0.46 Nm (親指を除く指の第2関節) |
|
| ペイロード | 15 Kg (測定方法によって異なる) | |
| 重量 | 1,024 g | |
| 解像度 | 0.088 ° | |
| コミュニケーション | プロトコル | CAN、RS-485(計画中) |
| 周波数 | 500 Hz (CAN) | |
| 電力要件 | 24.0 V / 5.0 A / 120W | |
アレグロハンドUXD
視覚化されたアプリケーションによる包括的なハンドコントロールシステム
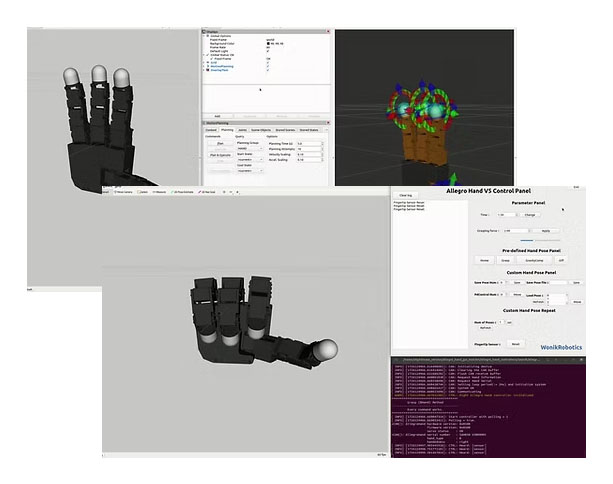
ROSによるハンドポーズの生成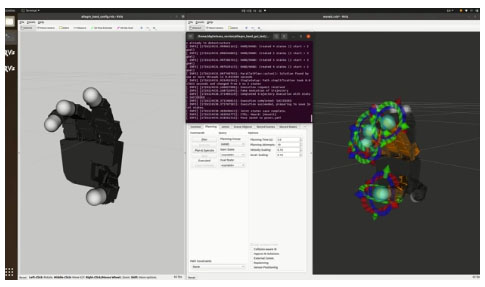
|
GUIによるハンドコントロール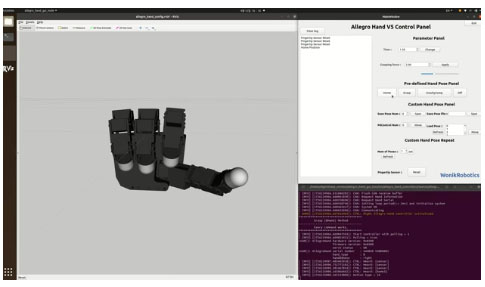
|
copyright (C) Nihon Binary Co., Ltd., All rights reserved.